-- 偰偺傂傜OBD-CAN儌僯僞 --
M5Stack傪巊偭偨斈梡OBDII-CAN儌僯僞偱偡丅
MiEV儌僯僞傪嶌惉偡傞嵺偵OBD-II偺PID傪挷嵏偡傞偨傔偵OBD-II偺CAN儌僯僞傪嶌惉偡傞昁梫偑偁偭偨偺偱丄OBD-II CAN儌僯僞傪嶌惢偟傑偟偨丅
仸MiEV儌僯僞偱偼偁傝傑偣傫両
i-MiEV丒儈僯僉儍僽MiEV偵偼MiEV儌僯僞傪棙梡偟偰偄偨偩偔偙偲傪悇彠偟傑偡丅乮斝晍弨旛拞偱偡乯
丂丂側偍丄MiEV儌僯僞偼m5stack + commu儌僕儏乕儖偱偼摦嶌偄偨偟傑偣傫.
仸杮婰帠偼僗僉儖偺偁傞曽傓偗偺婰帠偱偡丅(Arduino偱奐敪娐嫬傪僀儞僗僩乕儖丄娙扨側僾儘僌儔儉偺廋惓丒僐儞僷僀儖丒揮憲偑弌棃傞掱搙傪憐掕偟偰偍傝傑偡丅)
昁梫側婡嵽摍

M5 Stack BASIC (core2偼儃僞儞偺墴壓偵懳墳偟偰側偄偺偱僜乕僗偺夵憿偑昁梫偱偡)
M5 Stack Comm儌僕儏乕儖 廔抂掞峈傪庢傝奜偡夵憿偑昁梫偱偡
comm儌僕儏乕儖仺OBD僐僱僋僞愙懕働乕僽儖乮帺嶌)
USBtypeC 媼揹梡僇乕僠儍乕僕儍乕摍
M5Stack偱巊偊傞SD僇乕僪乮僨乕僞傪曐懚偡傞応崌偺傒乯
arduino奐敪娐嫬
comm儌僕儏乕儖偺夵憿
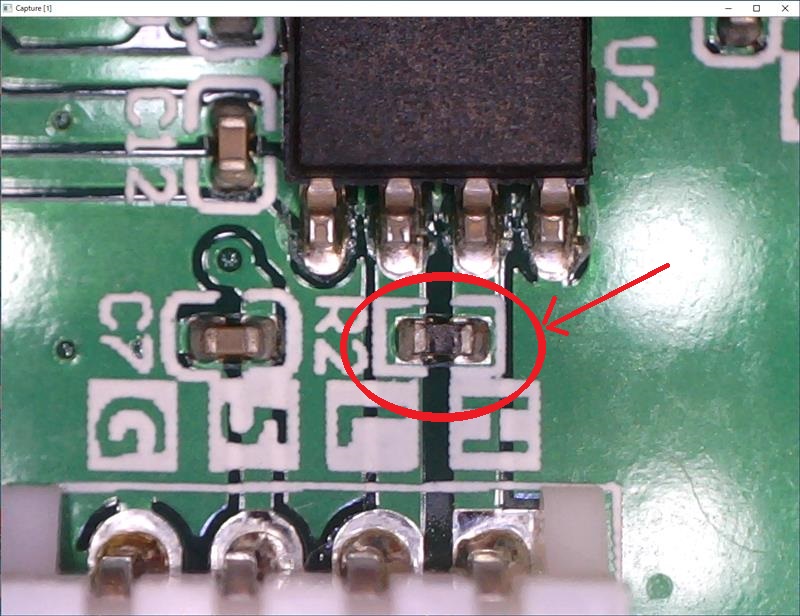
m5stack comm儌僕儏乕儖偼偦偺傑傑偱偼CAN偺廔抂掞峈偑愙懕偝傟偰偄傑偡偺偱丄敿揷偛偰偱R2偺僠僢僾掞峈傪庢傝奜偟傑偡丅
乮幵嵹忬懺偱偼憃曽廔抂偝傟偰偄傑偡偺偱丄120兌/2=60兌丄柍夵憿commu儌僕儏乕儖偺応崌丄120兌偑晅偄偰偄傞偲40兌偲側傝晧壸僆乕僶乕偲側傝傑偡丅)
働乕僽儖偺嶌惉
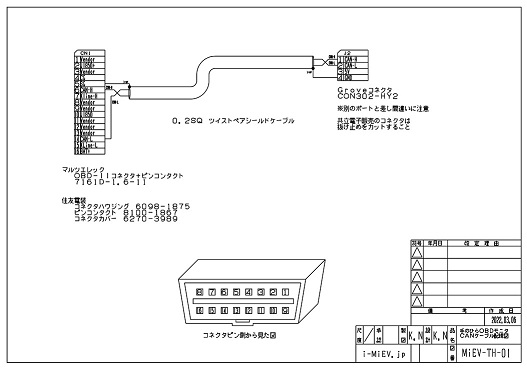 (夋憸僋儕僢僋偱pdf傪昞帵)
(夋憸僋儕僢僋偱pdf傪昞帵)夞楬恾偵廬偭偰働乕僽儖傪嶌惉偟傑偡丅
儔僀僽儔儕偺弨旛
M5stack偵昁梫側ESP32儔僀僽儔儕傗M5stack偺儃乕僪愝掕偼偁傜偐偠傔僀儞僗僩乕儖偝傟偰偄傞偲憐掕偟偰偍傝傑偡丅https://github.com/coryjfowler/MCP_CAN_lib傛傝丄mcp_can儔僀僽儔儕乕傪擖庤偟傑偡丅
arduino傪婲摦偟丄僗働僢僠仺儔僀僽儔儕傪僀儞僋儖乕僪仺zip宆幃偺儔僀僽儔儕傪僀儞僗僩乕儖偱儔僀僽儔儕乕傪僀儞僗僩乕儖偟傑偡丅
 丂丂
丂丂

僜乕僗僼傽僀儖偺擖庤乣僐儞僷僀儖乣彂偒崬傒
偙偪傜偵抲偄偰偍偒傑偡tenohira100.ino(Ver.1.00)(塃僋儕僢僋偱僼傽僀儖曐懚傪偟偰偔偩偝偄)
Arduino1.8.19丄M5Stack0.3.9 丄esp32 1.0.6偱奐敪丄専徹偟偰偍傝傑偡丅
巊偄曽
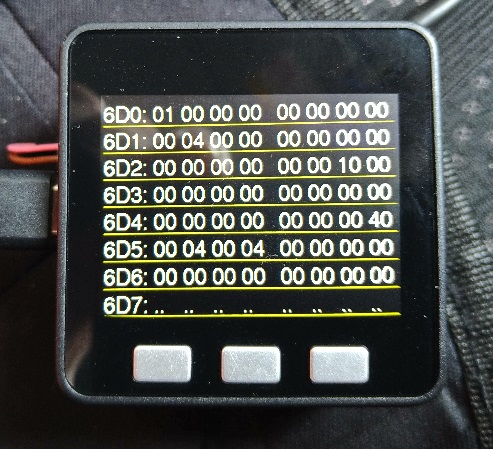
11價僢僩丄500kBps Standard儊僢僙乕僕丄PID 0x000偐傜0x7FF傑偱傪儌僯僞偱偒傑偡丅..昞帵偺偲偙傠偼僨乕僞側偟偲側傝傑偡丅
嵍儃僞儞偱PID傪憹壛丄拞儃僞儞偱PID傪尭彮
塃儃僞儞偱尰嵼偺忬懺傪SD僇乕僪偵曐懚偟傑偡
(儖乕僩僨傿儗僋僩儕偵obddata.txt偲偄偆柤慜偱曐懚偟傑偡)
CAN偺僷儔儊乕僞曄峏偼丄 init_can撪偺
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK)
偙偺曈傪曄峏偡傞偲椙偄偲巚偄傑偡丅
comm儌僕儏乕儖偼MCP2515傊偺嫙媼僋儘僢僋偑8MHz偱偡偺偱丄CAN懍搙偑懍偄偲僶僢僼傽僆乕僶乕僼儘乕偍偙偡壜擻惈偑偁傝傑偡丅
僗僞乕僩帪偺PID曄峏偼丂loop撪偺
stt=0x200; //僗僞乕僩PID
傪曄峏偡傞偲曄峏偱偒傑偡丅
楢棈愭
Twitter 傑偨偼丄e-mail(i-miev偁偭偲傑乕偔i-miev.jp)傑偱偍婅偄偟傑偡丅僩僢僾傊栠傞
(C)2022 i-miev.jp
峀崘棑
![[彜昳壙奿偵娭偟傑偟偰偼丄儕儞僋偑嶌惉偝傟偨帪揰偲尰帪揰偱忣曬偑曄峏偝傟偰偄傞応崌偑偛偞偄傑偡丅]](https://hbb.afl.rakuten.co.jp/hgb/3e48cfbb.da3d2008.3e48cfbc.fd5e7498/?me_id=1319041&item_id=10025580&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Fmarutsuelec%2Fcabinet%2F04881820%2F230620%2F2733151_2.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[彜昳壙奿偵娭偟傑偟偰偼丄儕儞僋偑嶌惉偝傟偨帪揰偲尰帪揰偱忣曬偑曄峏偝傟偰偄傞応崌偑偛偞偄傑偡丅]")

![[彜昳壙奿偵娭偟傑偟偰偼丄儕儞僋偑嶌惉偝傟偨帪揰偲尰帪揰偱忣曬偑曄峏偝傟偰偄傞応崌偑偛偞偄傑偡丅]](https://hbb.afl.rakuten.co.jp/hgb/3e48cfbb.da3d2008.3e48cfbc.fd5e7498/?me_id=1319041&item_id=10025467&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Fmarutsuelec%2Fcabinet%2F04881820%2F230620%2F1557654_2.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[彜昳壙奿偵娭偟傑偟偰偼丄儕儞僋偑嶌惉偝傟偨帪揰偲尰帪揰偱忣曬偑曄峏偝傟偰偄傞応崌偑偛偞偄傑偡丅]")
丂
丂崱擔偼5傾僋僙僗偁傝傑偡丅
丂嶐擔偼5傾僋僙僗偁傝傑偟偨丅